Cet article n’est pas un cours pour une qualification IFR, mais juste une vulgarisation des principes de navigation aux instruments, à mi-chemin des chapitres Navigation et structure des aéronefs.
Lorsqu’un aéronef est en vol, à tout moment il est nécessaire de savoir à la fois ou l’on se trouve et dans quelle direction on va.
Or, voler à vue du sol n’est pas toujours possible, la nuit, la météo, le vol on-top, l’altitude, ou le vol au-dessus d’un désert ou de la mer, font que la navigation à vue n’est pas toujours possible.
Le problème c’est très vite posé, dès les débuts de l’aviation, le compas et la montre comme unique aide à la navigation sont vite devenus insuffisants.
Les premiers systèmes
Parmi les solutions trouvées, qui sont devenues maintenant obsolètes, 2 méritent que l’on s’y arrête quelques instants.
La
navigation astronomique, comme sur les bateaux, mais il était assez difficile à
la fois de faire le point et de piloter, cette solution n’était applicable que
pour les aéronefs
 pouvant
emporter un équipage ou le navigateur n’avait que cette tâche à accomplir.
Encore faut-il pour faire le point au sextant, pouvoir distinguer l’horizon, et
les astres. Néanmoins, cette solution a perduré jusque dans les années 60. Un
astrodôme ou dôme hémisphérique transparent était installé dans le toit de la
cabine de pilotage de l’avion, ce qui permettait au navigateur d’utiliser un
sextant.
pouvant
emporter un équipage ou le navigateur n’avait que cette tâche à accomplir.
Encore faut-il pour faire le point au sextant, pouvoir distinguer l’horizon, et
les astres. Néanmoins, cette solution a perduré jusque dans les années 60. Un
astrodôme ou dôme hémisphérique transparent était installé dans le toit de la
cabine de pilotage de l’avion, ce qui permettait au navigateur d’utiliser un
sextant.
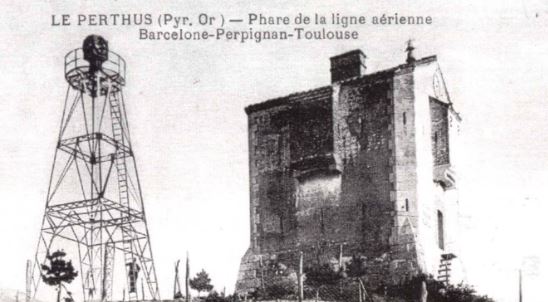 Une autre solution vite abandonnée, fut l’utilisation de phares aéronautiques,
leur éclairage dirigé vers le haut servait à baliser une route aérienne. Le
système a pris fin dès le début de la seconde guerre mondiale.
Une autre solution vite abandonnée, fut l’utilisation de phares aéronautiques,
leur éclairage dirigé vers le haut servait à baliser une route aérienne. Le
système a pris fin dès le début de la seconde guerre mondiale.
Puis vint la radio
L’arrivée de la radio et la construction d’émetteurs au sol a permis un nouveau mode de repérage. Au commencement tant les navires que les aéronefs utilisaient les émetteurs de TSF, puis virent des émetteurs spécifiquement installés pour la navigation.
Quelques rappels de la propagation des ondes électromagnétiques.
On va distinguer 2 types d’antenne :
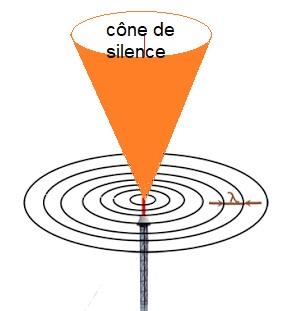
Antenne émettrice omnidirectionnelle
Comme son nom l’indique, une antenne omnidirectionnelle émet d’une façon uniforme dans toutes les directions du plan, au vertical de cette antenne on trouvera un espace appelé cône de silence dans lequel il n’y a pas de propagation.
Antenne émettrice à réflecteur ou directionnelle.
Son diagramme de propagation n’est pas uniforme dans le plan, certaines directions sont favorisées (lobes) l’ouverture du lobe principal sera plus ou moins grande en fonction du type d’antenne et de la fréquence (plus la fréquence est élevée, plus l’antenne est directionnelle)

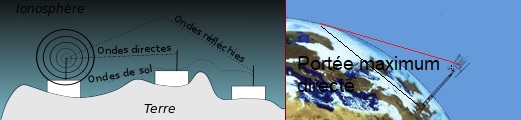
Propagation des ondes
Les ondes électromagnétiques se propage en ligne droite, ce qui veut dire qu’elles ont une distance de visibilité limitée sur terre du fait de la courbure terrestre, cette distance de visibilité varie en fonction de la hauteur de l’émetteur et du récepteur.
Dkm=4.1 sqr hauteur en m.
Parallèlement, à sa propagation, lorsqu’elle rencontre un obstacle, une partie de l’onde va être réfléchie. On aura donc plusieurs types de propagation.
Directe, onde de sol, onde de réflexion.
Principe du radiogoniomètre à cadre
Il faut un émetteur omnidirectionnel dont on connait la position, et du coté récepteur, une antenne très directionnelle, constituée par un solénoïde appelé cadre.
Si l’axe du solénoïde est aligné avec l’émetteur, la réception sera maximum, à contrario, si l’axe du solénoïde est perpendiculaire à la direction de l’émetteur, la réception sera nulle.
Un émetteur fixe dont on connait la localisation (un radiophare ou une radiobalise) permet de déterminer un lieu de position pour le récepteur et par conséquent une position en relevant au moins deux émetteurs.
L’ADF (AUTOMATIC DIRECTION FINDER)
C’est le premier vrai instrument de navigation radioélectrique.
L’ADF c’est le récepteur, il est indissociable des émetteurs au sol le NDB (Balise Non Directionnelle) inventée en 1920 par Fisher. Cet émetteur qui diffuse dans toutes les directions et avec la même puissance.
Il existe trois types d'émetteurs NDB :
- NDB souvent de grande portée de 100 à 200 Nm, il jalonne les voies aériennes. Son indicatif est généralement composé de trois lettres.
- Locator de portée réduite entre 15 et 30 Nm à proximité d'un aérodrome il est utilisé comme aide d'approche et d'atterrissage. Son indicatif est généralement composé de deux lettres. A ne pas confondre avec le localizer de l'ILS. (Nous y reviendront un peu plus loin)
- Broadcasting system émetteurs de radiodiffusion de très grande portée comme RTL 234KHz ou RMC 216 KHZ.
Sur une carte les balises NDB sont représentées par ce symbole

Précision : entre 5 et 10°, Inconvénients de l’ADF : sensible aux perturbations atmosphériques (orages), effets de côtes, de nuit (couches ionisées de la haute atmosphère)
L’ADF moderne donne le gisement de l’aéronef par rapport à la balise, c’est-à-dire l’angle entre l’axe longitudinal de l’aéronef et le segment balise-aéronef.
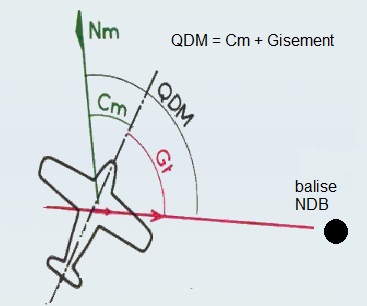
Pour obtenir le QDM c’est-à-dire la radiale par rapport à la balise, QDM = Cm + Gisement
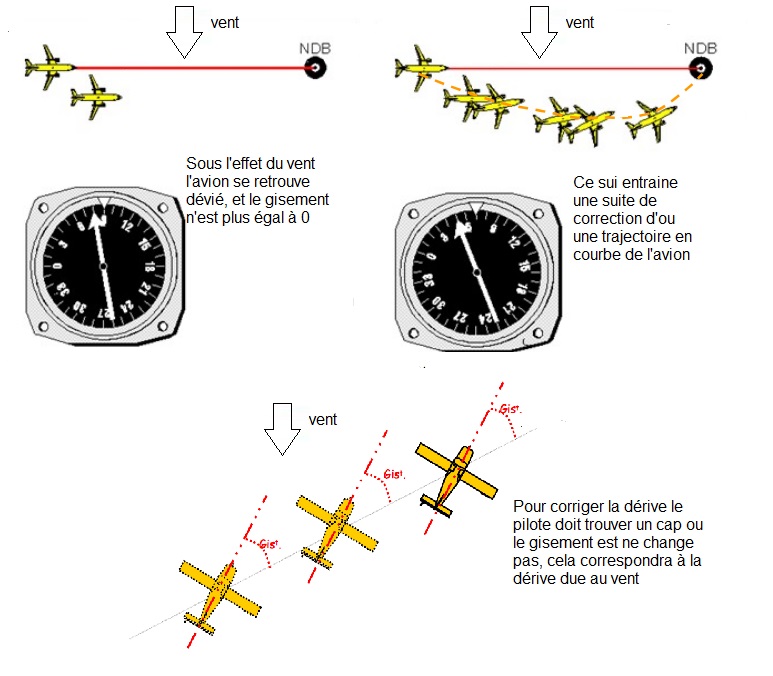
Dérive et ADF
On utilise aussi la recherche radiogoniométrique d’aéronef en détresse du plan SATER (Sauvetage Aéro-Terrestre) qui est un plan de secours mis en place au niveau départemental ayant pour objectif la recherche terrestre et la localisation précise d'aéronefs civils ou militaires en détresse et de ses occupants par les services chargés de radiogoniométrie dont l'ADRASEC. Les stations sols relèvent le gisement de l’aéronef, 2 stations sol suffise à repérer la position de l’aéronef.
Utilisation au sol
On utilise la recherche radiogoniométrique d’aéronef en détresse du plan SATER (Sauvetage Aéro-Terrestre) pour la recherche terrestre et la localisation précise d'aéronefs civils ou militaires en détresse et de ses occupants par les services chargés de radiogoniométrie dont l'ADRASEC.
Le VOR (VHF OMNIDIRECTIONAL RANGE)
Le VOR est l’évolution de l’ADF, le principe est bien différent il combine pour la station sol, antenne omnidirectionnelle et antennes directionnelles.
Il existe 2 principes de fonctionnement :
-Le VOR/C utilise un aérien constitué d'au moins deux groupes d'éléments rayonnants. L'un d'eux permet une émission omnidirectionnelle, c'est celui-ci qui diffuse l'information de référence. À l'inverse, l'autre groupe d'éléments permet un rayonnement directionnel. Son diagramme tourne à 30 t/s. C'est ce second groupe qui sert à transmettre l'information variable. Pour réaliser la rotation du diagramme variable, il y a deux solutions : une mécanique et une électronique. La version mécanique consiste tout simplement à faire tourner l'antenne à 30 t/s. Mais cela pose des problèmes d'usure des roulements et des connexions HF. Les versions récentes de VOR exploitent donc la solution électronique.
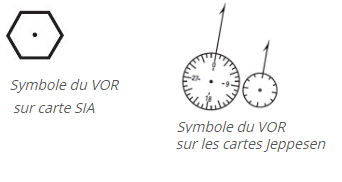
Sur une carte les balises VOR sont représentées par ce symbole
-Le VOR/D utilise l'effet Doppler, avec une antenne centrale entourée par des antennes périphériques (généralement 48) disposées sur un cercle de 6,8 m de rayon.
L'antenne centrale émet la porteuse (f0) modulée en amplitude (30 Hz)
Deux antennes de part et d'autre émettent l'une en bande latérale supérieure et l'autre en bande latérale inférieure.
La somme de ces trois signaux donne un signal f0 modulé en amplitude à 30 Hz plus 2 signaux à f0+9 960 Hz et f0-9 960 Hz.
Le fait de faire tourner les petites antennes à la vitesse de 30 t/s autour de l'antenne centrale crée une légère (mais suffisante) modulation de fréquence de l'enveloppe (9960 +/- 480 Hz) du signal final. La rotation est virtuelle, simulée par commutation entre les antennes périphériques. (Une rotation réelle nécessiterait de faire tourner des antennes à environ 4 500 km/h autour de l'antenne principale).
Portée du VOR
Le VOR utilise la VHF, donc la propagation du signal est rectiligne et de ce fait la portée est tributaire de l’altitude de l’aéronef généralement de 40 à 200 MN.
Le cône de confusion
A la verticale de l'émetteur se crée un cône de confusion ou d'incertitude dans lequel les indications du VOR sont peu fiables. L'aiguille de déviation de l'indicateur devient très sensible et oscille de droite à gauche et le TO/FROM passe alternativement de TO à FROM et de FROM à TO. Une fois l'aéronef sorti de cette zone l'indication redeviendra stable en position FROM. Avant la balise, l’instrument indique le QDM (TO) après avoir passé la balise, l’instrument indique le QDR (FROM)
Antenne VOR

Utilisation de l’instrument
L’instrument ne demande que d’afficher la fréquence du VOR,
pour éviter la confusion avec un autre VOR (surement plus lointain) le VOR
diffuse en morse les 3 lettres de son identification . Et
donne directement la radiale VOR sur laquelle se trouve l’aéronef. L’utilisation
de 2 VOR permet par triangulation de trouver sa position exacte.
. Et
donne directement la radiale VOR sur laquelle se trouve l’aéronef. L’utilisation
de 2 VOR permet par triangulation de trouver sa position exacte.
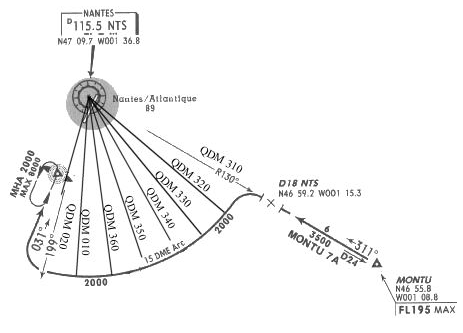
La DME (Distance Measurement Equipment)
Certaines station VOR sont équipées d’un outil supplémentaire à la navigation : un outil de mesure de la distance par radio. On les nomme VOR DME.
Le principe est simple, l’aéronef envoie une requête radio, et la balise DME répond. Le temps parcouru par les ondes pour faire l’aller-retour permet de calculer la distance aéronef-balise.
La partie VOR permet de savoir sur quelle radiale on se trouve, la partie DME permet de savoir à quelle distance on se trouve.
Sur une carte les balises VORDME sont représentées par ce symbole.
Le système TACAN (système de navigation aérienne tactique)
C’est un système de navigation utilisé par les aéronefs militaires. Il fournit à l'utilisateur l'orientation et la distance (portée oblique ou hypoténuse) par rapport à une station terrestre ou embarquée. Il s'agit d'une version plus précise du système VOR / DME qui fournit des informations sur les relèvements et les distances pour l'aviation civile. La partie DME du système TACAN est disponible pour un usage civil ; dans les installations VORTAC où un VOR est combiné à un TACAN, les aéronefs civils peuvent recevoir des lectures VOR / DME.
Sur une carte les balises TACAN représentées par ce symbole

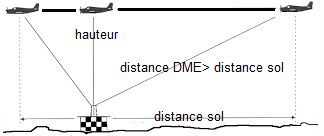
Mais attention, la DME donne la distance balise aéronef, ce n’est qu’une approximation de la distance sol. D’ailleurs lorsque l’on survole une balise DME, celle-ci nous indiquera notre hauteur !
La distance sol =sqr (distance DME² - hauteur² ) Attention les unités doivent être les mêmes (1 MN arrondi à 6000 ft)
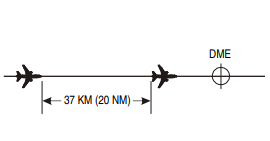
La DME ne permet pas seulement de savoir ou l’on se trouve, dans la mesure ou l’on connait la distance aéronef-balise, on peut réduire l’espacement entre 2 aéronefs circulant sur la même radiale, donc augmenter le trafic d’une airways.
Autre utilité, effectuer un virage DME, par exemple pour se positionner sur l’hippodrome d’attente en évitant le survol de l’aérodrome.
Le GPS
Principe de fonctionnement
Le système GPS permet de se situer où qu’on soit dans le monde. Il fonctionne avec une constellation de 30 satellites en orbite autour de la Terre. Chaque satellite envoie sur Terre des signaux comportant, la position dans l’espace du satellite, l’heure et la date d’émission du signal.
Le temps que met le signal pour arriver jusqu’au récepteur va déterminer la distance récepteur-satellite.
La réception d’un satellite va déterminer une présence probable sur un cercle.

La réception de 2 satellites va déterminer une présence probable sur 2 points correspondant à l’intersection de 2 cercles.

La réception de 3 satellites va déterminer une présence probable sur 1 point, intersection de 3 cercles

Pour la synchronisation de l’horloge du boîtier GPS, il faut la précision d’une horloge atomique. Or le récepteur GPS n’en a pas. Il va utiliser l’horodatage issu d’un quatrième satellite.
Il faut au minimum recevoir les signaux de quatre satellites : trois pour la position, et un supplémentaire pour la synchronisation. Dans les faits, plus on reçoit de signaux satellitaires, plus précis sera le positionnement. Le système GPS est capable nom seulement de fournir les coordonnées du récepteur, mais aussi sa hauteur par rapport à la géoïde terrestre, mais la précision altimétrique est moins bonne.
Système GPS d’un aéronef
Il en existe 2 types :
L’affichage textuel, qui n’indique que les coordonnées (on ne le rencontre pratiquement plus)

L’affichage cartographique qui intègre un récepteur GPS ainsi qu’un base cartographique aéronautique.
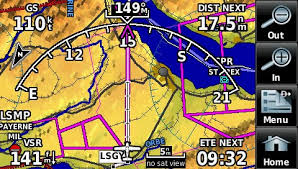
L’utilisation est très de nos GPS automobile, ils peuvent aussi nous indiquer notre cap (vrai) ainsi que notre vitesse, mais attention il s’agit de la vitesse sol et non de la vitesse air de l’aéronef. Certains GPS peuvent être connectés au système de pilotage automatique.
Imprécisons du système GPS
Des facteurs perturbent le signal émis par les satellites GPS.
-La traversée de l'atmosphère nécessite une correction des résultats des calculs. Car la traversée de la troposphère, modifie la vitesse et la direction de l'onde du fait de l'humidité et des modifications de pression. Les récepteurs intègrent donc un modèle de correction.
-La relativité restreinte et la relativité générale interviennent aussi.
La relativité restreinte implique que le temps ne s'écoule pas de la même façon dans le référentiel du satellite, que dans le référentiel du récepteur, à cause de la vitesse du satellite.
La relativité générale explique que l'écoulement du temps au niveau des satellites est plus rapide, en raison de leur faible gravité, que celle du récepteur. Ces 2 effets entrainent un décalage entre les fréquences émises et leur valeur réelle. Le système doit tenir compte de ces 2 effets relativistes dans la synchronisation des horloges.
La centrale inertielle (Inertial Reference System (IRS), Inertial Navigation System (INS))
VOR, ADF, GPS, nécessitent une infrastructure externe à l’aéronef. Ceci peut s’avérer dangereux en cas de panne, de conflit armé, ou de tempête solaire. La centrale inertielle se passe de toute infrastructure. C’est une technique assez ancienne, car les V1 et V2 de la seconde guerre mondiale employaient déjà cette technologie.
Fonctionnement simplifié d’une centrale inertielle
Une centrale à inertie est un équipement de navigation comportant six capteurs :
-3 gyromètres mesurant les trois composantes du vecteur vitesse angulaire (vitesses de variation des angles de roulis, de tangage et de lacet) ; et
-3 accéléromètres mesurant les trois composantes du vecteur force spécifique. La force spécifique est la somme des forces extérieures autres que la gravitation, le tout divisé par la masse. Cette quantité a donc la dimension d'une accélération. Le calculateur de la centrale à inertie réalise l'intégration en temps réel, uniquement à partir des mesures de ces six capteurs et peut rendre : les angles d'attitude (roulis, tangage et cap), le vecteur vitesse et la position.
À partir d'un point de départ connu en attitude et position, les mouvements instantanés (déplacements linéaires et rotations) permettent d'estimer les nouveaux angles d'attitude, le vecteur vitesse, ainsi que la position de la centrale inertielle.
2 technologies sont disponibles, la centrale à inertie à cardans et la centrale à inertie liée
-La centrale à cardans place ses 3 accéléromètres sur une plateforme qui est stabilisée par 3 gyroscopes.

-La centrale à inertie liée (Strapdown), les accéléromètres sont liés à la structure de l’avion, et le calculateur tient compte des angles roulis-lacet-tangage donnés par les gyroscopes. Cette technologie a l’avantage de ne pas avoir besoin de maintenance mécanique.
L’instrument cabine de la centrale inertielle ou MSU (Mode Selector Unit) boitier de commande qui permet de choisir les différents modes de fonctionnement, ainsi que l'affichage des coordonnées.

Instruments pour l’aide à l’atterrissage
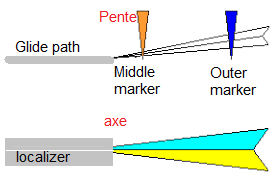
L'Instrument Landing System (ILS) ou Système d'atterrissage aux instruments est le moyen de radio-navigation pour l'atterrissage IFR. L'ILS est aussi un type d'approche (approche dite de précision).
Il comprend deux éléments :
1 localizer (LOC) qui fournit l'écart de l'avion par rapport à l'axe de la piste ;
1 glide path qui fournit l'écart de l'avion par rapport à la pente nominale d'approche (environ 3°).
Ces deux informations apparaissent, soit sous forme d'aiguilles sur un indicateur VOR ou mieux sur un plateau de route HSI, soit sous forme d'index (barres, triangles, ...) sur deux échelles, l'une horizontale, l'autre verticale, situées de part et d'autre de l'horizon artificiel (classique ou EFIS).
Les faisceaux localizer et glide path sont très étroits, leur interception doit être validée à l'aide d'une autre source de navigation.
Pour le localizer cela peut être réalisé à l'aide d'un VOR, ADF ou de la RNAV.
Pour la validation du glide path, on utilise un ou 2 markers, souvent remplacés par un DME (Distance Measuring Equipment) dont l'avantage est de fournir une information de distance en continu. Le DME est le plus souvent co-implanté avec le glide path, donnant ainsi directement la distance au seuil de piste, ce qui est très pratique ; mais il arrive exceptionnellement qu'il soit implanté avec le localizer.
Un voyant lumineux et un signal sonore sont activés au passage de chacun des markers. L'information de distance DME est quant à elle fournie sur l'afficheur DME.
D'un point de vue pratique, l'utilisateur affiche une seule fréquence, celle du localizer, comprise dans la gamme VHF 108,0 - 111,975 MHz. Les fréquences glide path et DME lorsqu'elles existent sont dans des gammes de fréquences différentes (UHF) mais appariées à celle du localizer, ce qui reste transparent pour l'utilisateur.
La portée du localizer est de 15 à 20 NM, un peu moins pour le glide path.
Le DME d'un ILS, moins puissant qu'un DME en route est reçu entre 50 et 100 NM.
Avantages de l'ILS :
-Très grande précision ; sous certaines conditions (dégagement des aires critiques, séparations accrues entre avions, secours électrique, balisage spécifique, ...), il permet de réaliser des atterrissages automatiques et donc de se poser avec des visibilités très faibles.
Inconvénients de l'ILS :
-Sensible aux perturbations des faisceaux électriques (par véhicule ou avion au sol ou avion en vol)
- Possibles faux axes par réflexion du faisceau sur un relief
-faisceaux étroits nécessitant une aide pour la capture.
Le localizer est constitué par un ensemble d'antennes situées après le bout de la piste qui émettent une porteuse VHF entre 108 et 111,975 MHz, première décimale impaire (111,75 MHz pour la piste 26 à Orly par exemple).

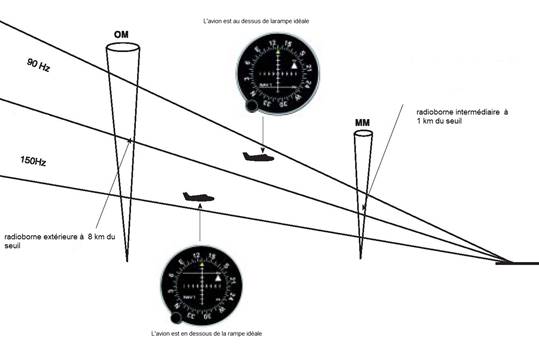
Elle est modulée par 2 basses fréquences, l'une à 90 Hz et l'autre à 150 Hz. À droite de l'axe de la piste, le taux de modulation du 150 Hz est supérieur à celui du 90 Hz et inversement à gauche de l'axe. La différence de taux permet d'en déduire un écart qui est affiché sur le récepteur de bord.
Il s'ajoute une modulation à 1 020 Hz qui transmet le code Morse d'identification de la station correspondant généralement à 2 ou 3 lettres de l'alphabet (OLW pour la piste 26 à Orly par exemple) transmis au moins 6 fois par minute .
Le diagramme de rayonnement est ouvert dans le plan horizontal d'environ 35° de part et d'autre de l'axe de piste et de 7° dans le plan vertical. La zone de guidage linéaire ne couvre quant à elle qu'une ouverture maximum de +/- 107 m par rapport à la position d'axe. Soit pour une piste de 2000m une ouverture d'environ +/- 3° (Atan(107/2000)).
Glide Path

Mât et antennes Glide
Le glide path est constitué par un ensemble d'antennes situées généralement entre 120 m et 150 m sur le côté de la piste, près du seuil, qui émettent une porteuse UHF entre 328,6 et 335,4 MHz appairée à la fréquence du localizer.
Elle est modulée par 2 basses fréquences l'une à 90 Hz et l'autre à 150 Hz. Au-dessous du plan de descente, le taux de modulation du 150 Hz est supérieur à celui du 90 Hz et inversement au-dessus du plan. La différence de taux permet d'en déduire un écart qui est affiché sur le récepteur de bord.
Ils assurent un plan de descente réglable et généralement de l'ordre de 3° (entre 2,5 et 3,5) (3° en Cat III).
Le faisceau du glide n'est plus exploitable à partir de 15 m. Pour les atterrissages automatiques l'avion est guidé par les informations de la radiosonde et du vario.
Markers
Les markers ou radiobornes sont des radiobalises à émission verticale placées sur la trajectoire finale des avions qui émettent sur la fréquence 75 MHz. Ils sont peu à peu remplacés par des DME appariés à la fréquence du localizer.
-L'outer marker (radioborne extérieure) situé à environ 8 km du seuil est modulé à 400 Hz, il allume un voyant bleu dans le cockpit et émet une tonalité Morse de 2 traits par seconde ( - - ).
-Le middle marker (radioborne intermédiaire) situé à environ 1 km du seuil est modulé à 1 300 Hz, il allume un voyant ambre (orange) dans le cockpit et émet une tonalité Morse de 2 fois 1 trait et 1 point ( - * - * ), mais 1 trait et 1 point par seconde ( - *).
-L 'inner marker (radioborne intérieure) situé à environ 100 m du seuil est modulé à 3 000 Hz, il allume un voyant blanc dans le cockpit et émet une tonalité Morse de 6 points par seconde ( * * * * * * ). Il n'y a pas d'inner marker implanté sur les aérodromes français.
Le Radar de précision (PAR) ou (GCA) :
Le Radar de précision (PAR) ou (GCA) permet le contrôle de l'avion par rapport à une trajectoire située sur l'axe de la piste en azimut et en site. Il nécessite un opérateur au sol qui va guider l’avion.
L'avion est guidé jusqu'au seuil de la piste, le pilote reçoit les corrections de caps et d'altitude à apporter.
Le Radar d'atterrissage GCA permet de mesurer :
- La distance de l'avion à la station.
- L'azimut de l'avion par rapport à l'axe de piste.
- L'angle de site de l'avion par rapport au plan de descente.
La précision est la même qu’un système ILS et le système est utilisable même pour les aéronefs n’ayant aucun instrument dédié, mais du fait que ce système nécessite un opérateur, il est peu employé sauf dans le domaine militaire.