Les cahiers du B.I.A
AEROTECHNIQUE LES DIFFERENTS TYPES D'AERONEFS
Pour commencer
l’aérotechnique on va déjà voir la classification de aéronefs, nous reviendrons
ensuite plus en détail sur chaque type. Le texte qui suit est assez exhaustif,
pas de panique l’examen du BIA ne rentre pas autant dans les détails.
Définition : aéronef
anciennement aéronef: Terme générique désignant tout appareil capable de se
mouvoir dans les airs. De « aéro »
: relatif à l’air et « nef » « navis »
: navire.
Tout moyen de transport doit
répondre au moins à 3 fonctions :
• la
sustentation (ce qui lui permet de tenir en l’air)
• la
direction (ce qui lui permet de se diriger)
• la
propulsion (ce qui lui permet d’avancer)
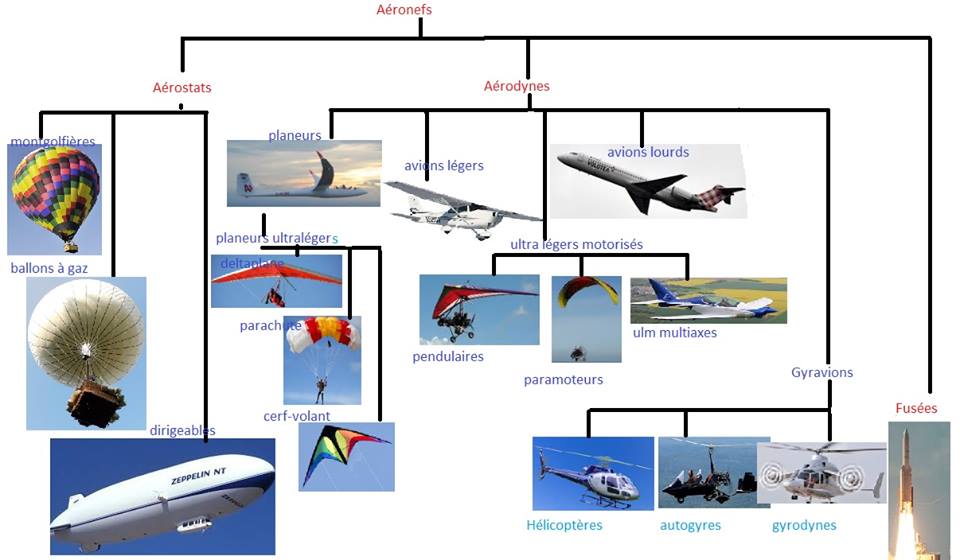
Sur ce principe, on va
distinguer 3 grands groupes en fonction du mode de sustentation. Nous ne
classerons pas ici les drones du fait de leur grande diversité technologique.
Mais nous en dirons quelques mots à la fin.
-Les plus légers que l’air ou
aérostats, ils se sustentent dans l’air selon le principe d’Archimède.
Tout corps plongé dans un
fluide au repos, entièrement ou traversant sa surface libre, subit une force
verticale, dirigée de bas en haut et opposée au poids du volume de fluide
déplacé. En ce qui nous concerne le fluide c’est l’air.
-Les plus lourds que l’air ou
aérodynes, ils se sustentent par les forces dynamiques que l’air exerce sur eux
du fait du mouvement.
-Les fusées qui sont un peu à
part car plus lourdes que l’air elles devraient être classées parmi les
aérodynes, mais ce ne sont pas les forces aérodynamiques de l’air qui sont à
l’origine de la sustentation, mais la force produite par leur moteur et les lois
de la balistique.
1 Les aérostats
On va distinguer :
- Les montgolfières dont la
sustentation est assurée en chauffant l’air enfermée dans l’enveloppe ce qui va
entrainer la diminution de sa densité. Selon la loi physique de Boyle-Mariotte
ou loi de Mariotte P x V / T°= constante, attention T° est exprimé en degré
kelvin soit degré Celsius+273. La différence de densité entre l’air extérieur et
l’air dans l’enveloppe x le volume de l’enveloppe doit générer une force capable
de s’opposer au poids de l’aérostat.
Nous devons les montgolfières
aux frères Montgolfier, fabricants de papier en Ardèche, ceux-ci voyant du
papier s’envoler avec la fumée de la cheminée en déduisent que la fumée en était
responsable. Ce n’est que plus tard que l’on fit la relation entre t° de l’air
et sustentation. La compréhension du phénomène était mauvaise mais cela permit
tout de même le 19 octobre 1783 le premier en vol humain.
La propulsion d’un tel engin
dépendra du vent et sa direction de la direction du vent, L’aérostier ne peut
agir que sur l’altitude en chauffant l’enveloppe ou en laissant échapper de
l’air chaud, c’est ainsi qu’il trouvera ‘’LE bon’’ vent qui le propulsera (ou
non) dans la bonne direction.
-Les ballons à gaz appelés
CHARLIERE, là aussi la sustentation est assurée par la différence
de densité entre un gaz « léger » à l’intérieur de l’enveloppe (hydrogène, puis
hélium ensuite) et celle de l’air extérieur. Nous les devons au physicien
Jacques Charles et aux frères Robert, qui ratèrent de peu le premier vol humain.
Mais la première traversée de la manche eut lieu le 7 janvier 1785 avec un
ballon à gaz.
Le pilotage s’effectue de la
même façon que la montgolfière, mis à part que le pilote largue du lest pour
monter et laisse échapper du gaz pour descendre.
-Ballons Hybrides, appelés
aussi ROZIERE, il n’y en eu que quelques modèles, mais des engins qui
combinaient à la fois une enveloppe d’hydrogène et un feu en dessous pour
chauffer l’air étaient assez dangereux, c’est d’ailleurs dans un tel engin que
Jean-François Pilâtre de Rozier trouva
la mort dans une tentative de traversée de la manche.
-Les dirigeables, ils sont
constitués d’une enveloppe de gaz soit selon le principe de la montgolfière soit
selon le principe du ballon à gaz (hydrogène, puis hélium). Mais en plus, ils
disposent d’un moyen de propulsion, et de direction. Ils n’apparurent réellement
que lorsque la technologie des moteurs le permit. C’est Henri Giffard qui a
imaginé et construit le premier aérostat dirigeable mû par une machine à vapeur
placée dans la nacelle. Le premier vol se déroula le 24
septembre 1852 soit 69 ans après le premier vol d’aérostat.
Le pilotage se fait dans les
3 dimensions et combine les techniques des aérostiers et celles des pilotes
avion.
Il existe 2 sortes de
dirigeables :
-les dirigeables souples dont
la structure tient sa rigidité de la pression à l’intérieur de l’enveloppe.
-les dirigeables rigides. Une
structure métallique contient l’enveloppe et absorbe les contraintes
aérodynamiques.
2 Les aérodynes
Ils se sustentent grâce au
déplacement de l’air sur leur voilure, soit du fait de leur vitesse, soit grâce
à une voilure tournante.
On va distinguer :
Les planeurs,
Un planeur est un aérodyne qui est dépourvu de moteur, ou optimisé pour plane.
Un planeur n’a pas besoin de vent pour tenir en l’air. Etant dépourvu de moteur
il possède une voilure spécialement étudiée pour planer. La conséquence en est
qu’ils ne peuvent décoller par leurs propres moyens, un avion remorqueur ou un
treuil est nécessaire. C’est son poids qui l’entraine vers le bas et lui confère
sa vitesse. Pour rester en l’air le pilote doit chercher des ascendances. Le
planeur est en descente continuelle dans une masse d’air qui monte, c’est ce qui
lui permet de garder ou d’augmenter son altitude. Certains planeurs appelés
‘moto-planeur’ sont munis d’un moteur permettant de décoller sans l’aide d’un
avion remorqueur ou d’un treuil.
Les
planeurs ultralégers, comprenant :
-Le delta-plane qui
originellement et le plus souvent comporte une voilure Rogallo,
mu au départ par l’énergie musculaire ou potentielle, il se dirige par
déplacement du centre de gravité sur 2 axes.
-Le parapente, sa voilure est
souple, se « gonfle » avec la vitesse pour obtenir un profil type aile d’avion,
là encore, sans moteur il décolle et se meut grâce à l’énergie musculaire ou/et
potentielle. Il se dirige par gauchissement des ailes.
-Le parachute : c’est un
dispositif destiné à freiner le mouvement vertical d’un objet ou d’un individu
dans les airs. Se présentant le plus souvent comme une simple coupole, il existe
maintenant des parachutes de même architecture que le parapente permettant un
certain pilotage.
-Le cerf-volant :
habituellement sans passager et manœuvré ou simplement rattaché au sol à l’aide
d’un ou plusieurs fils. Il est généralement fabriqué avec de la toile et
éventuellement une armature rigide.
-L’avion,
c’est un aérodyne entraîné par un propulseur, dont la portance aérodynamique est
obtenue par des surfaces fixes (sauf les ailes à effet Magnus).
La propulsion s’effectue
grâce à un moteur à explosion soit grâce à un turbomoteur. Le pilotage
s’effectue dans les 3axes. On va les distinguer essentiellement en fonction de
leur capacité.
-avion lourd ->masse >5,7
tonnes
-avion léger ->masse < 5,7
tonnes
-Ultra léger motorisé ->
masse >450kg
-pendulaire 2axes
correspondant à un deltaplane motorisé
-3 axes, dont la technologie
et le pilotage est comparable à un avion
-para moteur comparable à un
parapente motorisé
-l’aéro-modèle,
reproduction à échelle réduite des autres aérodynes, sans pilote et généralement
télécommandé.
Juste pour les citer, 2 cas à
part :
- l’avion 2 axes, très en
vogue dans les années 1930, mais un peu oublié aujourd’hui.
-L’avion à aile à effet
Magnus ou la portance est obtenue par rotation d’un cylindre (même principe que
l’effet donné à un ballon de foot ou que les voiles du voilier Alcyone).
-Les giravions ou aéronefs à
voilure tournante Ce sont des aéronefs dans lesquels la sustentation est assurée
en totalité ou en partie par la rotation d’un ou de plusieurs rotors à axes
verticaux. On distinguera :
-Les hélicoptères sont des
appareils dont la sustentation et la propulsion sont assurées par une voilure
tournante, couramment appelée rotor, et entraînée par un ou plusieurs moteurs.
La plupart des hélicoptères utilisent un seul rotor de sustentation et un rotor
anti couple, les autres solutions sont bi-rotors contrarotatifs
placés sur le même axe, sur deux axes convergents, en tandem ou sur les côtés.
C’est l’incidence donnée aux pales du rotor qui permet le contrôle en profondeur
et roulis, et celle donnée aux pales de l’anti couple qui contrôle l’axe de
lacet.
-Les autogyres
-Les gyrodynes Ce
sont des appareils dont la sustentation et les mouvements verticaux sont assurés
par un rotor principal entraîné par un moteur, comme un hélicoptère, et dont la
traction est obtenue par un ou plusieurs autres moteurs, comme un avion. Le
principe est proche de l’autogire dont la voilure tournante est libre,
contrairement au girodyne. On peut le considérer comme un hybride
avion-hélicoptère
-Les drones :
Un drone (du mot anglais signifiant faux bourdon1) ou sans-pilote désigne un
aéronef sans humain à bord (mais le plus souvent télécommandé). Le drone peut
avoir un usage civil ou militaire. En France, la réglementation incorpore les
activités d’aéromodélisme avec celle des drones, la loi limitant le poids des aéromodèles à
150kg, l’utilisation d’un drone supérieur à 150kg demande alors une autorisation
permettant la réalisation de l’activité particulière concernée, sous toute
réserve jugée utile, lorsque la conformité aux conditions applicables a été
démontrée.. Notez aussi que l’on parle
de vol d’aéronef sans humain, on parle aussi de drone transportant des
personnes, mais sans pilote.
Leurs taille et masse (de
quelques grammes à plusieurs tonnes) dépendent des capacités recherchées. Le
pilotage automatique ou à partir du sol permet pour certains des vols longs de
plusieurs dizaines d’heures.
Leur technologie peut reposer
sur les principes de vol, du dirigeable, de l’avion, des voilures
tournantes type hélicoptère ou multirotor.
3 Les fusées,
En astronautique la fusée est
un véhicule qui se déplace dans l’espace ou dans l’atmosphère grâce à un
moteur-fusée en emportant à la fois son carburant et son comburant. Une fusée
peut comprendre plusieurs étages.
 Retour
vers le site CIRAS
Retour
vers le site CIRAS