

Cet article propose :
- Une narration de toutes les étapes de l’expérimentation d’OZOBOT dans une classe de CM2 et en CP/CE1 pour une première découverte de l’objet technique.
- En téléchargement, le dossier complet avec les fiches de travail testées en classe. Bien sûr, ces documents sont certainement perfectibles. Ce sont des propositions à aménager selon ses propres objectifs.
Dans les programmes :
Cycle 1 :
Les élèves apprennent à « utiliser des marqueurs spatiaux adaptés (devant, derrière, droite, gauche, dessus, dessous…) dans des récits, descriptions ou explications ».
Ils apprennent également à « situer des objets par rapport à soi, entre eux, par rapport à des objets repères », « se situer par rapport à d’autres, par rapport à des objets repères » et « dans un environnement bien connu, réaliser un trajet, un parcours à partir de sa représentation (dessin ou codage) ».
Ce travail leur permet de développer l’aptitude à émettre des instructions élémentaires de déplacement, instructions qu’ils apprendront à associer dans les cycles suivants pour construire des programmes de déplacement.
Cycle 2 :
Les élèves apprennent à « coder et décoder pour prévoir, représenter et réaliser des déplacements dans des espaces familiers, sur un quadrillage, sur un écran ».
Ces déplacements ont lieu dans des espaces réduits en début de cycle (classe ou école) pour s’étendre progressivement tout au long du cycle jusqu’au quartier ou village pour lesquels ils pourront utiliser des plans.
À partir du CE1, les élèves sont invités à coder des déplacements à l’aide d’un logiciel de programmation adapté.
Cycle 3 :
Les élèves apprennent à « programmer les déplacements d’un robot ou ceux d’un personnage sur un écran ». Les élèves travaillent « dans des espaces de travail de tailles différentes (la feuille de papier, la cour de récréation, le quartier, la ville, etc.) », ils utilisent pour cela des plans en travaillant « avec de nouvelles ressources comme les systèmes d’information géographique ».
Le cadre est aussi celui « d’activités géométriques (construction de figures simples ou de figures composées de figures simples) », en utilisant des logiciels de géométrie dynamique.
Découverte et codage par suites de couleurs :
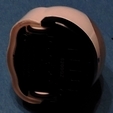
Le robot OZOBOT se présente sous la forme d’un petit objet hémisphérique muni de deux roues commandées par deux micro-moteurs. Sa « tête » contient une led qui peut s’allumer ou clignoter de plusieurs couleurs. Il se recharge à l’aide d’un port micro USB.

Observer, questionner, expérimenter et argumenter, procéder par essais et erreurs, démarche d’investigation, tâtonnement, créativité ; développement de l’esprit critique et de l’intérêt pour le progrès scientifique et technique.
Mais comment ce robot se dirige-t-il ?
C’est l’approche que nous avons utilisée avec les élèves : observer l’objet, le décrire, le dessiner, essayer de deviner comment on peut le mettre en route… Même les plus petits repèrent la prise pour le recharger, les roues, le bouton pour l’allumer.
Une fois allumé que se passe-t-il ? Le robot clignote, se déplace un peu puis s’arrête (s’il est sur une feuille blanche). Si par hasard on le pose sur un support coloré… il s’allume en prenant la couleur du support…
C’est le moment d’observer ensemble le dessous du robot avec ses capteurs qui clignotent. Les capteurs « voient » les couleurs. On peut alors faire rappeler aux enfants, par analogie, quels sont nos capteurs à nous, nos sens et constater que nous en possédons bien plus que le robot !
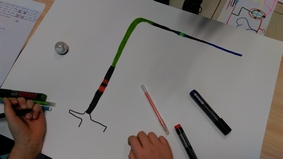
Mais comment donner des ordres au robot ? On demande alors aux élèves de tracer une ligne au feutre noir et de se débrouiller pour faire réagir OZOBOT avec cette ligne. En tâtonnant, ils pensent à poser le robot sur la ligne… et celui-ci se met à suivre la ligne… ou pas… On analyse pourquoi ensemble : la largeur du trait est importante.
Ensuite, on peut tester ce qui se passe avec d’autres couleurs de traits, d’autres épaisseurs, d’autres sortes de crayons… Il faut constater et expliquer que le robot est assez sensible aux nuances de couleurs, à la luminosité ambiante, ce qui peut le conduire à des réactions parfois aléatoires.
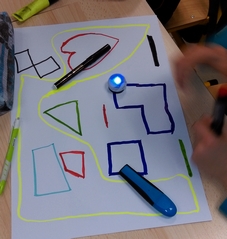
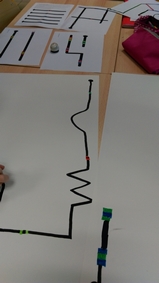
Il faut alors faire découvrir ce qui se produit lorsque le robot arrive à une intersection : il choisit sa direction de façon aléatoire.
Il est possible alors de laisser les élèves inventer des parcours librement afin d’observer ce que fait le robot, ce qui se passe si on met plusieurs robots sur le même parcours…

Associer un comportement du robot à un code écrit. Faire le lien entre le code et l’action souhaitée. Se construire un répertoire d’instructions. Anticiper le comportement du robot en lisant une suite de codes. Choisir les codes nécessaires pour produire un déplacement. Comprendre son erreur et modifier les instructions données.
Mobiliser les compétences d’orientation spatiale.
L’étape suivante consiste à faire découvrir aux élèves les instructions élémentaires que le robot peut comprendre. En voyant une suite de couleurs il peut effectuer des actions variées. Les élèves font donc fonctionner le robot sur les fiches proposées. Ils doivent noter les codes de couleurs et ce que fait le robot pour se constituer un répertoire d’instructions.
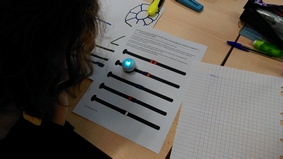
Armés de ce répertoire, on laisse les élèves construire de nouveaux parcours à tester.
Les élèves disposent alors des éléments leur permettant de résoudre les situations problèmes proposées dans les différentes fiches :
- Anticiper le point de sortie du robot et vérifier :
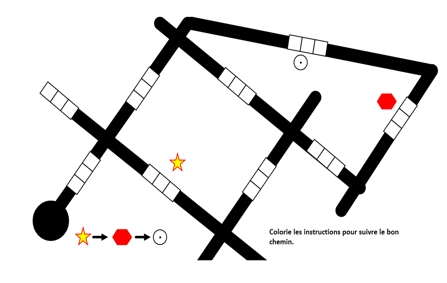
- Colorier les instructions nécessaires pour suivre l’itinéraire dans le bon ordre :
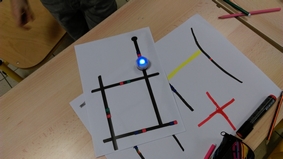
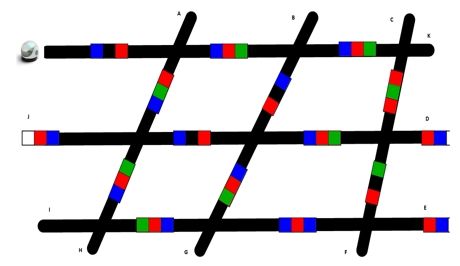
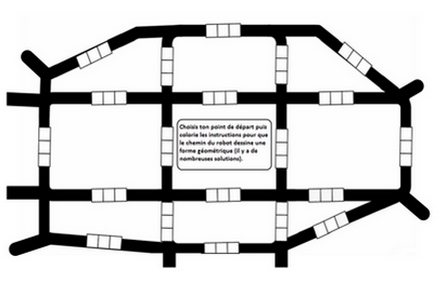
- Sur le réseau donné, faire suivre au robot une forme géométrique :
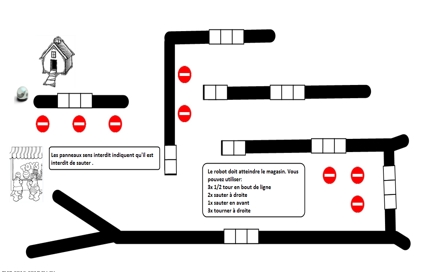
- Le robot doit rejoindre l’arrivée dans tous les cas : nécessite d’anticiper toutes les possibilités. N’utiliser que les instructions données :
OZOBOT et programmation avec Ozoblockly :
Se familiariser avec le langage de programmation. Anticiper le déplacement du robot. Lire un algorithme. Y trouver des erreurs et les corriger.
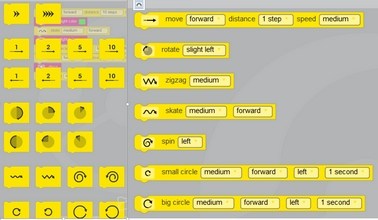
Ozoblockly est un langage par blocs en anglais. Les mots utilisés sont simples et bien illustrés par des icônes. Il est possible d’utiliser 4 niveaux de programmation.
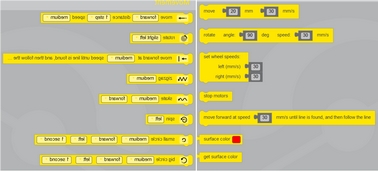
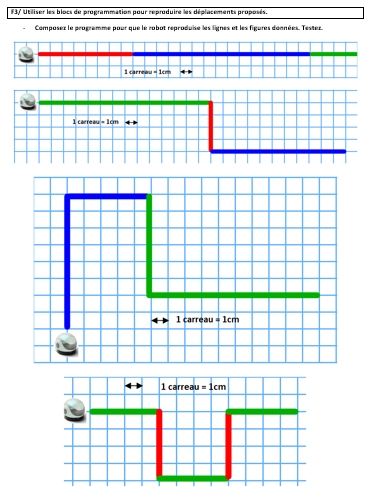
Les fiches se basent sur le mode le plus avancé permettant de programmer les déplacements en centimètres. Lors de l’expérimentation il est apparu qu’il est difficile de vérifier si le programme est juste en voyant le déplacement du robot : précision, robot n’allant pas toujours bien droit, pas de traces… Cependant l’anticipation des déplacements et leur programmation avec les blocs est extrêmement intéressante.
Il est possible de conduire un travail semblable sur ce site : http://games.ozoblockly.com/shapetracer-basic
Une autre limite de ce mode de fonctionnement est le côté très aléatoire de la transmission du code de l’écran au robot par flashes de couleurs.

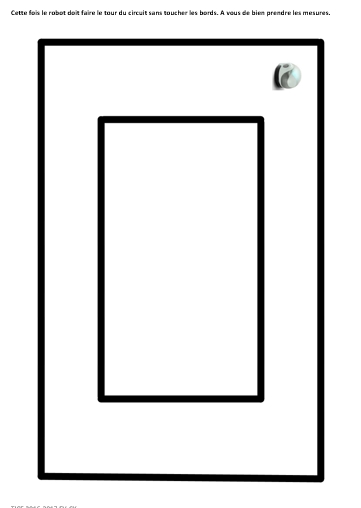
Exemples de fiches proposées :
D’autres pistes :
- Le site du constructeur : https://ozobot.com/
- Le guide pour l’utilisation d’OZOBOT sur PRIMABORD : https://primabord.eduscol.education.fr/IMG/pdf/guide_ozobot_3.pdf
- Académie de Besançon : https://numerique.circo25.ac-besancon.fr/2022/01/06/utiliser-un-robot-ozobot-en-classe-seances-cycle-3-a-telecharger/
- OZOBOT en classe d’ULIS (CANOPE 78) : https://www.reseau-canope.fr/creatice/spip.php?article737
- Une fiche guide de l’INSHEA : http://www.inshea.fr/sites/default/files/fichier-orna/EG_Ozobot.pdf
Article écrit par Frédéric VAST conseiller pédagogique de la circonscription de COMMERCY